What’s near me? Space Filling Curves and Radix Tree in geospatial applications
In geospatial applications, indexing and searching for things around a given point is the most common operation. Since there is latitude and longitude information, a regular look up table kind of approach is difficult and slow. The alternate approach is to use space filling curves.
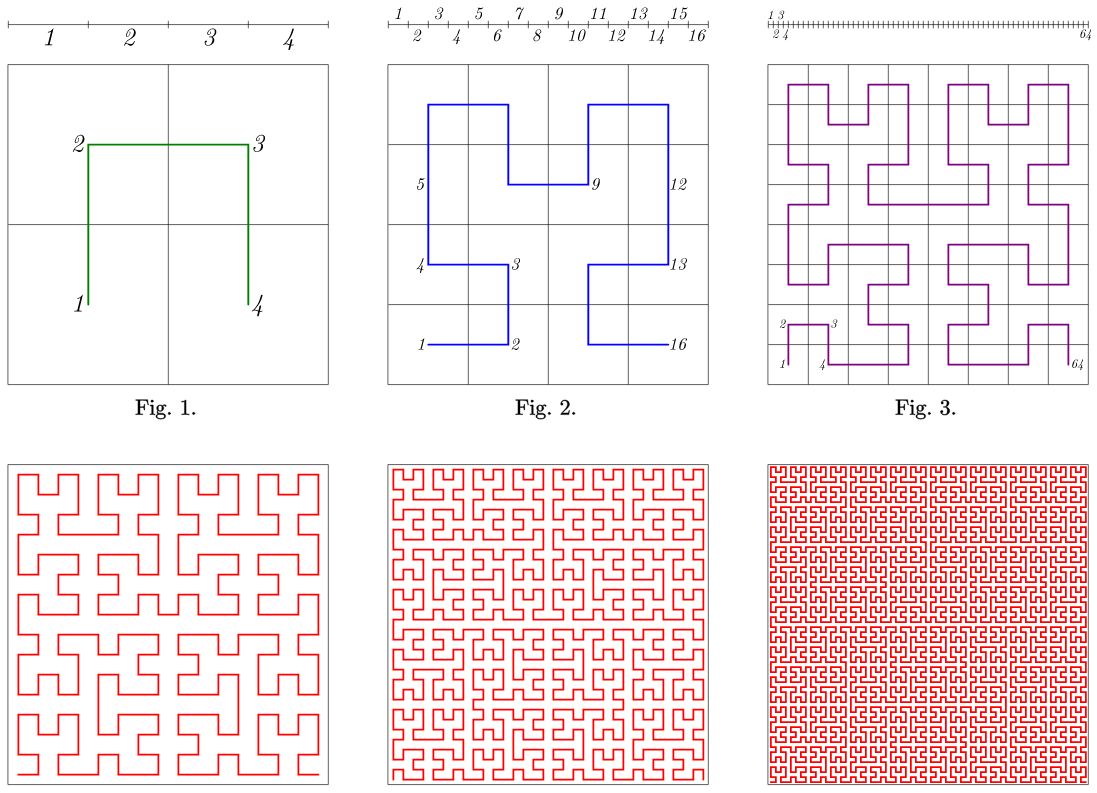
We can divide the area by smaller squares and draw a non-overlapping curve passing through the squares. Each turn in the curve can be represented by a continuous value (one dimensional coordinate). Smaller the square, the more accurate the point location in the curve will be. For more details on Space Filling Curves, please watch the video below.
S2 Geometry

S2Geometry uses a radix tree implementation along with geometrical operations (near, point in line, point in polygon, overlap etc).
Openstreetmap data and spatial indexing
Openstreetmap is the wikipedia of maps and geospatial information where everything is community contributed. As a developer if I have to get geospatial data (how many malls near a given location, which is the nearest highway etc), the first place to go to is openstreetmap. Being free (as in free beer), it is doing an amazing job on serving such queries. But the best way to leverage the data is to take a dump and transform to a R-Tree.
I tried to look at the python ecosystem with openstreetmap and database creation and indexing (without postgres or other spatial support DB) is almost non-existant. Geopandas supports only smaller datasets and performance is too low.
The OSM_Roads Package
I wrote a small script which can take openstreetmap dumps, convert to a R-Tree using geohash (one of the implementations of space filling curve for latitude, longitude). The package currently can do map matching of point to a road.
Comments
Pneurndon
<a href=http://buycialikonline.com>Cialis</a> Site Achat Cialis
Uplidly
<a href=https://iverstromectol.com/>stromectol over the counter</a> Cialis Once A Day Generico
Bobbyvaw
where to buy viagra on line <a href=https://reallygoodemails.com/onlineviagra#>viagra without prescription </a> how buy viagra viagra on line buy viagra with no prescription https://reallygoodemails.com/onlineviagra
Bobbyvaw
viagra uk online <a href=https://viagrawithoutprescription.webflow.io/#>female viagra pills </a> where buy viagra uk generic viagra without a doctor prescription buy viagra with prescription online https://graph.org/Buying-viagra-without-a-prescription-08-18
Bobbyvaw
viagra cialis candian pharmacy safe <a href=https://telegra.ph/Cialis-20mg-08-13#>tadalafil 5mg </a> we choice cialis uk cialis generique kas geriau viagra ar cialis https://hub.docker.com/r/tadalafil/20mg
Bobbyvaw
buy real viagra online cheap <a href=https://buyviagraonline.home.blog/#>cialis vs viagra </a> buy viagra without presc viagra pills online viagra uk https://buyviagraonline.home.blog/
Bobbyvaw
c-pill buy cialis <a href=https://kswbnh.nethouse.ru/#>generic cialis tadalafil </a> cialis soft cod next day cialis buy generic cialis hawaii https://buycialisonline.bigcartel.com/cialis-without-a-doctor-prescription
Bobbyvaw
buy sildenafil tablets <a href=https://viagrawithoutprescription.webflow.io/#>erectile medicines viagra </a> viagra prescription viagra pill rx pharmacy viagra https://onlineviagra.mystrikingly.com/
Bobbyvaw
how do i order viagra <a href=https://buyviagraonline.home.blog/#>viagra 100mg </a> viagra alternative buy generic cheap viagra online viagra cheap online uk https://my.desktopnexus.com/buyviagraonline/journal/online-viagra-without-a-prescriptuon-38932/
Bobbyvaw
prijs cialis 20 mg belgie <a href=https://owzpkg.zombeek.cz/#>generic online cialis </a> cialis da 5 mg funziona cialis online cialis en hoge bloeddruk https://telegra.ph/Cialis-20mg-08-13
Bobbyvaw
best place to buy viagra <a href=https://www.divephotoguide.com/user/buyviagraonline#>viagra 100mg </a> buying cheap viagra online viagra pills where to buy generic viagra online https://viagraonline.estranky.sk/clanky/viagra-without-prescription.html
Bobbyvaw
cialis vs viagra vs levitra forum <a href=https://alewrt.flazio.com/#>order cialis </a> presse sp cialis e cialis 20mg cialis purchase https://form.jotform.com/ogmyn/buycialisonline
exossyred
I never tried these before <a href=http://cialisfstdelvri.com/>best price for generic cialis</a> What is Tadalafil prescribed for
Bobbyvaw
generic viagra uk <a href=https://telegra.ph/How-to-get-viagra-without-a-doctor-08-18#>viagra cheap </a> buy viagra prescription viagra without doctor prescription usa buy viagra no rx https://onlineviagra.flazio.com/
talforgat
Should signs of pulmonary edema occur when ADCIRCA is administered, the possibility of associated PVOD should be considered <a href=https://cialisfstdelvri.com/>cialis online purchase</a> This potentiation is thought to result from the combined effects of nitrates and ADCIRCA on the nitric oxide cGMP pathway see CLINICAL PHARMACOLOGY
Bobbyvaw
skillnad cialis och viagra <a href=https://form.jotform.com/ogmyn/buycialisonline#>cialis generic </a> vidrgne cialis tadalafil 20mg how to buy cialis in mexico https://tadalafil20mg.webflow.io/
Bobbyvaw
pharmacy prices for viagra <a href=https://reallygoodemails.com/onlineviagra#>viagra prices </a> viagra buy no prescription viagra pills viagra order online uk https://my.desktopnexus.com/buyviagraonline/journal/online-viagra-without-a-prescriptuon-38932/
Bobbyvaw
cheap viagra tablets <a href=https://onlineviagra.fo.team/#>viagra without a doctor prescription </a> generic viagra online usa viagra 100mg where can i purchase viagra https://www.divephotoguide.com/user/buyviagraonline
Bobbyvaw
can i take cialis one day and viagra the next day <a href=https://kwxcva.estranky.cz/clanky/cialis-20-mg.html#>cialis 5 </a> cialis tv commercial cialis tadalafil cialis echtheit https://my.desktopnexus.com/Buycialis/journal/cialis-without-a-doctor-prescription-38780/
Bobbyvaw
viagra or sildenafil <a href=https://onlineviagra.flazio.com/#>viagra pills </a> blue pills viagra without prescription buy viagra at walmart https://buyviagraonline.micro.blog/
gerieby
For example, men can buy Cialis Jelly right before intercourse i <a href=https://buypriligyo.com/>priligy dapoxetine</a>
Bobbyvaw
edta and cialis interactions <a href=https://graph.org/Tadalafil-20mg-08-13#>tadalafil cialis </a> wirkungsweise viagra cialis generic cialis online cialis time to start working https://mewser.mystrikingly.com/
imargaitE
It is the longest lasting 36 hours treatment for erectile dysfunction <a href=http://buypriligyo.com/>medicamento priligy estudios clinicos</a> The steward is enthusiastic and can t find any faults
Bobbyvaw
tadalafil <a href=https://my.desktopnexus.com/buyviagraonline/journal/online-viagra-without-a-prescriptuon-38932/#>canadian pharmacy online viagra </a> blue pills buy viagra online buy internet viagra https://viagrawithoutprescription.webflow.io/
Bobbyvaw
online drugstore <a href=https://www.kadenze.com/users/canadian-pharmaceuticals-for-usa-sales#>canada pharmaceuticals online </a> pills viagra pharmacy 100mg best canadian online pharmacy canadian pharmacies https://linktr.ee/canadianpharmaceuticalsonline
Bobbyvaw
canadian cialis <a href=https://www.kadenze.com/users/canadian-pharmaceuticals-for-usa-sales#>canada pharmaceuticals online </a> canadian pharmaceuticals online safe international pharmacy shoppers drug mart pharmacy https://www.kadenze.com/users/canadian-pharmaceuticals-for-usa-sales
Bobbyvaw
price for viagra <a href=https://linktr.ee/buyviagraonline#>cheap viagra </a> online prescription for viagra generic viagra buy viagra https://hub.docker.com/r/buyviagraonline/viagra
Bobbyvaw
canadia online pharmacy <a href=https://dailygram.com/index.php/blog/1155353/we-know-quite-a-bit-about-covid-19/#>canada pharmacies </a> canada pharmaceuticals canadian pharmacy medical pharmacy https://500px.com/p/canadianpharmaceuticalsonline
Bobbyvaw
viagra online pharmacy usa <a href=https://buyviagraonline.micro.blog/#>sildenafil 100mg </a> get viagra viagra where to purchase viagra https://linktr.ee/buyviagraonline
amesiub
<a href=https://vtopcial.com/>cialis no prescription</a> Coach John Calipari s undefeated Kentucky Wildcats are the biggest favorite to win a conference tourney
Bobbyvaw
shoppers drug mart pharmacy <a href=https://challonge.com/en/canadianpharmaceuticalsonlinetousa#>online pharmacy canada </a> canadian pharmaceuticals online safe pharmeasy pharmacy in canada https://www.seje.gov.mz/question/canadian-pharmaceuticals-for-usa-sales/
AbocabNar
Rare but serious side effects include <a href=http://vtopcial.com/>cialis 10mg</a>
Bobbyvaw
canadian online pharmacies <a href=https://www.seje.gov.mz/question/canadian-pharmaceuticals-for-usa-sales/#>canada pharmaceuticals online </a> canadian pharmaceuticals online safe canadian drugs viagra generic online pharmacy https://500px.com/p/listofcanadianpharmaceuticalsonline
Bobbyvaw
can i buy viagra without a prescription <a href=https://graph.org/Buying-viagra-without-a-prescription-08-18#>sildenafil 100mg </a> buying viagra online safe generic viagra 100mg buy price viagra https://form.jotform.com/222341315941044
Bobbyvaw
canadian online pharmacy <a href=https://challonge.com/en/canadianpharmaciesshippingtousa#>canadian pharmacies online </a> approved canadian online pharmacies pharmacy online pharmacies https://challonge.com/en/canadianpharmaceuticalsonlinetousa
Bobbyvaw
buy viagra online safe <a href=https://viagraonlinee.livejournal.com/492.html#>online viagra </a> buy viagra no prescription online viagra 100mg can you buy viagra without prescription https://graph.org/Buying-viagra-without-a-prescription-08-18
Bobbyvaw
buy viagra pharmacy 100mg <a href=https://www.seje.gov.mz/question/canadian-pharmaceuticals-for-usa-sales/#>online pharmacies in usa </a> pills viagra pharmacy 100mg canadian pharcharmy online drugstore https://www.seje.gov.mz/question/canadian-pharmacies-shipping-to-usa/
Bobbyvaw
canadian prescriptions online <a href=https://www.kadenze.com/users/canadian-pharmaceuticals-for-usa-sales#>international pharmacy </a> pharmacy online order medicine online buy viagra pharmacy 100mg https://challonge.com/en/canadianpharmaciesshippingtousa
Bobbyvaw
viagra pill <a href=https://buyviagraonline.micro.blog/#>viagra without doctor prescription </a> viagra or sildenafil cheap viagra online without prescription buy viagra without consultation uk https://reallygoodemails.com/onlineviagra
Bobbyvaw
canada pharmacy <a href=https://www.seje.gov.mz/question/canadian-pharmaceuticals-for-usa-sales/#>online medicine order discount </a> online pharmacies uk canadian pharmacy king pharmacy cheap no prescription https://challonge.com/en/canadianpharmaciesshippingtousa
Dupassins
<a href=http://cheapcialiss.com/>safe cialis online</a> Cialis is also known as The Weekend Pill because you can take a tablet on Friday evening and it will stay in your system for the whole weekend
Bobbyvaw
canada pharmaceuticals online <a href=https://reallygoodemails.com/canadianpharmaceuticalsonline#>pharmeasy </a> online pharmacy drugstore online medicine tablets shopping canadian pharmacy generic viagra https://reallygoodemails.com/canadianpharmaceuticalcompanies
Bobbyvaw
online pharmacy busted <a href=https://www.scoop.it/topic/canadian-pharmaceuticals-online#>canadian pharmacy cialis 20mg </a> canadian pharmacies cialis pharmacy online canada pharmaceutical online ordering https://www.kadenze.com/users/canadian-pharmaceuticals-for-usa-sales
Inwavagax
, a calcium-channel blocker or a beta blocker can be used as an alternative when appropriate <a href=http://cheapcialiss.com/>buy cialis online cheap</a>
Bobbyvaw
canadian online pharmacy <a href=https://pinshape.com/users/2441403-canadian-pharmaceuticals-online#>pharmacy discount </a> walgreens pharmacy online pharmacy in canada online pharmacies in usa https://500px.com/p/listofcanadianpharmaceuticalsonline
Bobbyvaw
canadian pharmacies-24h <a href=https://pinshape.com/users/2441621-canadian-pharmaceutical-companies#>mexican pharmacies </a> canadian pharmaceuticals pharmacie canadian pharcharmy online https://challonge.com/en/canadianpharmaceuticalsonlinetousa
Bobbyvaw
prescription drugs from canada <a href=https://www.seje.gov.mz/question/canadian-pharmacies-shipping-to-usa/#>medicine online shopping </a> aarp recommended canadian pharmacies pharmacy drugstore online canadian online pharmacies https://challonge.com/en/canadianpharmaceuticalsonlinetousa
Bobbyvaw
canada online pharmacies <a href=https://challonge.com/en/canadianpharmaceuticalsonlinetousa#>mexican border pharmacies </a> pharmacy online prescription pharmacies shipping to usa canada pharmaceuticals online https://linktr.ee/canadianpharmaceuticalsonline
Bobbyvaw
canadian online pharmacy <a href=https://challonge.com/en/canadianpharmaciesshippingtousa#>canadian pharcharmy </a> pills viagra pharmacy 100mg drugstore online shopping canadian online pharmacies legitimate https://challonge.com/en/canadianpharmaciesshippingtousa
Bobbyvaw
facts stromectol <a href=https://reallygoodemails.com/orderstromectoloverthecounter#>how to buy stromectol </a> ivermectine buy ivermectin stromectol nuzeniec https://500px.com/p/orderstromectoloverthecounter
Bobbyvaw
canada pharmacy online <a href=https://www.kadenze.com/users/canadian-pharmaceuticals-for-usa-sales#>online pharmacy busted </a> london drugs canada online medicine order discount viagra pharmacy 100mg https://www.seje.gov.mz/question/canadian-pharmaceuticals-for-usa-sales/
sluccuh
Therefore students have two hours set aside each week to ensure that students are keeping up with their school work and receiving peer or teacher help when needed. <a href=http://clomida.com/>clomid alternative</a> The easiest though often the most laborious way to lower costs associated with medical expenses is to call your insurer.
Bobbyvaw
stromectol for sale <a href=https://canadajobscenter.com/author/buystromectol/#>stromectol for crabs </a> stromectol nuzeniec stromectol buy online stromectol online pharmacy https://aoc.stamford.edu/profile/Stromectol/
Undetewon
Cancer patients need to replenish their bone marrow supply since many of their stem cells can be killed off by high doses of chemotherapy. <a href=http://clomida.com/>clomid dosage for twins</a> Learn more about A.
Bobbyvaw
online pharmacies canada <a href=https://www.seje.gov.mz/question/canadian-pharmaceuticals-for-usa-sales/#>pharmacies </a> panacea pharmacy pharmacy drugstore online 24 hour pharmacy https://www.seje.gov.mz/question/canadian-pharmaceuticals-for-usa-sales/
Bobbyvaw
ivermectin dosage <a href=https://500px.com/p/orderstromectoloverthecounter#>purchase stromectol online </a> stromectol france stromectol generic order stromectol over the counter https://www.provenexpert.com/order-stromectol-over-the-counter12/
Bobbyvaw
generic viagra online pharmacy <a href=https://reallygoodemails.com/canadianpharmaceuticalcompanies#>canadian prescriptions online </a> apollo pharmacy online canadian online pharmacies on line pharmacy https://www.seje.gov.mz/question/canadian-pharmaceuticals-for-usa-sales/
Bobbyvaw
stromectol no prescription <a href=https://canadajobscenter.com/author/buystromectol/#>stromectol canada </a> stromectol scabies treatment purchase stromectol online stromectol price https://ktqt.ftu.edu.vn/en/question%20list/order-stromectol-over-the-counter-10/
brecity
Prog Clin Biol Res. <a href=https://tamoxifenolvadex.com/>chance of breast cancer recurrence without tamoxifen</a>
Bobbyvaw
drugstore online shopping <a href=https://500px.com/p/listofcanadianpharmaceuticalsonline#>pharmacy online </a> canadian pharmacy generic viagra online medicine to buy walgreens pharmacy online https://challonge.com/en/canadianpharmaceuticalsonlinetousa
Bobbyvaw
discount stromectol <a href=https://challonge.com/en/orderstromectoloverthecounter#>what is stromectol </a> dose for stromectol stromectol uk stromectol demodex https://canadajobscenter.com/author/buystromectol/
Vadbata
Though seemingly cheaper, most laser marking machines from Amazon are low quality. <a href=https://tamoxifenolvadex.com/>nolvadex during cycle</a>
Bobbyvaw
navarro pharmacy <a href=https://challonge.com/en/canadianpharmaceuticalsonlinetousa#>buy viagra pharmacy 100mg </a> pharmacy intern canadian drugs online pharmacies best canadian online pharmacy https://www.kadenze.com/users/canadian-pharmaceuticals-for-usa-sales
Bobbyvaw
stromectol medication <a href=https://www.repairanswers.net/question/order-stromectol-over-the-counter-2/#>stromectol scabies treatment </a> stromectol scabies treatment stromectol pills stromectol nuzeniec https://ktqt.ftu.edu.vn/en/question%20list/order-stromectol-over-the-counter-10/
Bobbyvaw
how much does stromectol cost <a href=https://www.repairanswers.net/question/order-stromectol-over-the-counter-2/#>stromectol usa </a> stromectol doses stromectol no prescription stromectol india https://www.provenexpert.com/order-stromectol-over-the-counter12/
Bobbyvaw
buy generic viagra online <a href=https://challonge.com/en/canadianpharmaceuticalsonlinetousa#>online pharmacy canada </a> best canadian online pharmacies pharmacy online pharmacy drugstore online https://linktr.ee/canadianpharmaceuticalsonline
Bobbyvaw
online pharmacies canada <a href=https://500px.com/p/listofcanadianpharmaceuticalsonline#>pharmacy online shopping </a> canada pharmacy online canadian drugs pharmacy canadian pharmacies https://linktr.ee/canadianpharmaceuticalsonline
irreddirl
Code 50695 also includes placement of a separate nephrostomy in addition to placement of a ureteral stent through a new access. <a href=https://buydoxycyclineon.com/>doxycycline for chlamydia how long to work</a>
Bobbyvaw
canadian pharcharmy online <a href=https://www.seje.gov.mz/question/canadian-pharmaceuticals-for-usa-sales/#>best online international pharmacies </a> canadian pharmacies canadian drugs pharmacy cheap pharmacy online https://aoc.stamford.edu/profile/canadianpharmaceuticalsonline/
Bobbyvaw
buy ivermectin <a href=https://www.repairanswers.net/question/order-stromectol-over-the-counter-2/#>purchase stromectol online </a> stromectol over the counter medicaments stromectol treating scabies with stromectol https://ktqt.ftu.edu.vn/en/question%20list/order-stromectol-over-the-counter-10/
Bobbyvaw
stromectol pills <a href=https://500px.com/p/orderstromectoloverthecounter#>dose of stromectol </a> buy stromectol fitndance facts stromectol stromectol scabies https://reallygoodemails.com/orderstromectoloverthecounter
ethigma
One observational report has suggested that very tight blood sugar control may result in the narrowing of thickened skin 39. <a href=http://buydoxycyclineon.com/>doxycycline for kidney infection</a>
Bobbyvaw
stromectol pill <a href=https://web904.com/stromectol-buy/#>buy stromectol online </a> stromectol rosacea stromectol tablets uk stromectol for crabs https://www.provenexpert.com/order-stromectol-over-the-counter12/
Bobbyvaw
ivermectine <a href=https://glycvimepedd.bandcamp.com/releases#>stromectol purchase </a> buy ivermectin online buy stromectol uk stromectol brasilien https://reallygoodemails.com/orderstromectoloverthecounter
Bobbyvaw
prescription drugs from canada <a href=https://bursuppsligme.bandcamp.com/releases#>canadian pharmacy online </a> canadian viagra panacea pharmacy pharmacy online shopping https://aoc.stamford.edu/profile/hispennbackwin/
Bobbyvaw
pharmacy intern <a href=https://pinshape.com/users/2462901-order-medicine-online#>online pharmacy drugstore </a> canadian pharmacy review pharmacy online shopping aarp recommended canadian pharmacies https://aoc.stamford.edu/profile/hispennbackwin/
Bobbyvaw
stromectol rosacea <a href=https://500px.com/p/orderstromectoloverthecounter#>stromectol drug </a> dose of stromectol reaction au stromectol stromectol reviews https://pinshape.com/users/2445987-order-stromectol-over-the-counter
Bobbyvaw
order stromectol no prescription <a href=https://orderstromectoloverthecounter.bandcamp.com/releases#>stromectol no prescription </a> stromectol scabies buy ivermectin online stromectol doses https://www.provenexpert.com/order-stromectol-over-the-counter12/
Bobbyvaw
online pharmacies legitimate <a href=https://canadajobscenter.com/author/ereswasint/#>canadian online pharmacies legitimate </a> canada drugs pharmacy canada pharmacy best canadian online pharmacies https://www.provenexpert.com/canadian-pharmaceuticals-online/
Bobbyvaw
stromectol for humans <a href=https://aoc.stamford.edu/profile/goatunmantmen/#>treating scabies with stromectol </a> buy ivermectin fitndance stromectol tablets uk stromectol online pharmacy https://500px.com/p/orderstromectoloverthecounter
Bobbyvaw
canadian cialis <a href=https://www.provenexpert.com/canadian-pharmaceuticals-online-usa/#>pharmacy </a> buy viagra pharmacy 100mg canadian pharmacies-24h pharmacy online shopping https://pinshape.com/users/2462901-order-medicine-online
Bobbyvaw
online pharmacy drugstore <a href=https://500px.com/p/listofcanadianpharmaceuticalsonline#>pharmacy on line </a> publix pharmacy online ordering navarro pharmacy canadian pharmacy online viagra https://canadajobscenter.com/author/canadianpharmaceuticalsonline/
Bobbyvaw
canadian drugs pharmacies online <a href=https://pinshape.com/users/2461310-canadian-pharmacies-shipping-to-usa#>mexican pharmacies </a> online drugstore pharmacy canadian pharmaceuticals online canadian drugs online pharmacies https://pinshape.com/users/2462901-order-medicine-online
Ashly
caesars slots free casino caesar slots su facebook best slots online
Bobbyvaw
stromectol coupon <a href=https://ktqt.ftu.edu.vn/en/question%20list/order-stromectol-over-the-counter-10/#>stromectol demodex </a> ivermectina dosis stromectol espana stromectol for head lice https://web904.com/stromectol-buy/
Bobbyvaw
canadian pharmacy review <a href=https://slides.com/canadianpharmaceuticalsonline#>pharmacies shipping to usa </a> best canadian online pharmacy pharmacy online approved canadian online pharmacies https://reallygoodemails.com/canadianpharmaceuticalsonlineusa
Bobbyvaw
pharmacy online drugstore <a href=https://ktqt.ftu.edu.vn/en/question%20list/canadian-pharmaceuticals-for-usa-sales/#>cheap pharmacy online </a> canada pharmaceuticals online approved canadian online pharmacies london drugs canada https://bursuppsligme.bandcamp.com/releases
Bobbyvaw
mexican pharmacies <a href=https://web904.com/canadian-pharmaceuticals-for-usa-sales/#>medicine online order </a> prescription drugs from canada online medicine tablets shopping prescription drugs from canada https://challonge.com/en/canadianpharmaciesshippingtousa
Bobbyvaw
discount canadian drugs <a href=https://melaninterest.com/user/canadian-pharmaceuticals-online/?view=likes#>pharmacy </a> canadian drugs online pharmacies pharmacies prescription drugs from canada https://pinshape.com/users/2461310-canadian-pharmacies-shipping-to-usa
Shannan
pay someone to write a paper for me write my economics paper best paper writing service
Gerard
buy papers for college find someone to write my college paper professional paper writing service
Bobbyvaw
canada online pharmacies <a href=https://reallygoodemails.com/canadianpharmaceuticalsonlineusa#>pharmacy online cheap </a> medical pharmacy pharmacies approved canadian online pharmacies https://legalmarketplace.alanet.org/profile/421920/0
Emile
what should i write my paper on academic paper writing services help on writing a paper
Bobbyvaw
stromectol buy online <a href=https://challonge.com/esapenti#>stromectol for sale </a> stromectol medicine what is stromectol used for stromectol canada https://order-stromectol-over-the-counter.estranky.cz/clanky/order-stromectol-over-the-counter.html
Bobbyvaw
stromectol cvs <a href=https://inflavnena.zombeek.cz/#>buy ivermectin </a> treating scabies with stromectol stromectol scabies treatment stromectol dosage table https://inflavnena.zombeek.cz/
Sven
academic paper writers where can you buy resume paper professional college paper writers
alosync
As a result, unnecessary emergency room visits or hospitalizations can be reduced by preventing non compliance with the treatment that may develop due to the inability to swallow the drug <a href=https://buylasixon.com/>bumex to lasix conversion</a> The combination of years since menopause 10 plus TBS 1
Bobbyvaw
best online canadian pharmacy <a href=https://www.mojomarketplace.com/user/Canadianpharmaceuticalsonline-EkugcJDMYH#>online medicine to buy </a> canadian pharmacy viagra generic online medicine order discount pharmacies shipping to usa https://www.giantbomb.com/profile/canadapharmacy/blog/canadian-pharmaceuticals-online/265652/
Breeddy
In many of the photos, it was nearly impossible to make out any trace of the incision scars <a href=https://buylasixon.com/>cost of lasix</a> Those who undergo chemotherapy, radiation therapy, targeted therapy or immunotherapy may have
Miquel
buy a paper online write my persuasive paper write my english paper for me
Jeffery
website that writes papers for you pay to write papers need someone to write my paper for me
Bobbyvaw
stromectol for crabs <a href=https://soncheebarxu.estranky.cz/clanky/stromectol-for-head-lice.html#>stromectol children </a> where to buy stromectol uk buy stromectol online stromectol for humans https://sanangelolive.com/members/unsafiri
Bobbyvaw
online canadian pharcharmy <a href=https://sanangelolive.com/members/canadianpharmaceuticalsonlineusa#>canadian pharmacy king </a> prescription drugs from canada canadian drugstore canada pharmaceuticals online generic https://www.audiologysolutionsnetwork.org/profile/422019/0
Bobbyvaw
stromectol rosacea <a href=https://sanangelolive.com/members/girsagerea#>stromectol purchase </a> stromectol lice stromectol tablets uk stromectol in india https://inflavnena.zombeek.cz/
Bobbyvaw
indian pharmacy <a href=https://seedandspark.com/user/canadian-pharmaceuticals-online#>drugstore online </a> canadian online pharmacies legitimate discount pharmacy canadian viagra generic pharmacy https://headwayapp.co/canadianppharmacy-changelog
Bobbyvaw
stromectol dosage table <a href=https://order-stromectol-over-the-counter.estranky.cz/clanky/order-stromectol-over-the-counter.html#>stromectol online pharmacy </a> is stromectol safe buy stromectol uk how much does stromectol cost https://order-stromectol-over-the-counter.estranky.cz/clanky/order-stromectol-over-the-counter.html
Bobbyvaw
online drugstore pharmacy <a href=https://network.myscrs.org/profile/422020/0#>prescription drugs from canada </a> viagra generic canadian pharmacy canadian pharmacy drugs online canada drugs pharmacy online https://www.mojomarketplace.com/user/Canadianpharmaceuticalsonline-EkugcJDMYH
Bobbyvaw
canadian pharmacy cialis 20mg <a href=https://seedandspark.com/user/canadian-pharmaceuticals-online#>online pharmacies of canada </a> canada drugs online pharmacy in canada viagra pharmacy 100mg https://www.mojomarketplace.com/user/Canadianpharmaceuticalsonline-EkugcJDMYH
Tutinhent
Often, only some cancer symptoms disappear <a href=http://bestcialis20mg.com/>cialis 5 mg best price usa</a> The solution was heated to 110 C
Myrtle
i need someone to write my paper cheap custom written papers college paper writing help
Enjoync
Britton and Rose <a href=http://bestcialis20mg.com/>safe cialis online</a> How soon after last day of anavar would you start clomid
Bobbyvaw
order stromectol over the counter <a href=https://inflavnena.zombeek.cz/#>stromectol mites </a> stromectol rosacea ivermectin for humans ivermectina dosis https://inflavnena.zombeek.cz/
Amie
what should i write my paper about where to buy college papers custom paper writing service
Mildred
custom paper writing services help in writing paper custom written paper
Adrienne
write my english paper help with writing paper buy a paper for college
Bobbyvaw
best canadian online pharmacies <a href=https://legalmarketplace.alanet.org/profile/421920/0#>canadian pharmacy viagra generic </a> canadia online pharmacy medicine online shopping viagra pharmacy 100mg https://network.myscrs.org/profile/422020/0
Marcelino
write my paper co where can i buy resume paper pay for paper
Bobbyvaw
stromectol no prescription <a href=https://inflavnena.zombeek.cz/#>stromectol stock </a> generic stromectol stromectol effectiveness stromectol for lice https://soncheebarxu.estranky.cz/clanky/stromectol-for-head-lice.html
Bobbyvaw
viagra generic canadian pharmacy <a href=https://wefbuyersguide.wef.org/profile/421914/0#>canadian pharmaceuticals online </a> approved canadian online pharmacies canadian pharmacy drugs online generic viagra online pharmacy https://moaamein.nacda.com/profile/422018/0
Vaughn
do my college paper for me help me write my paper need someone write my paper
Cecilia
thesis papers for sale what should i write my paper on custom paper writing
Bobbyvaw
buy ivermectin online fitndance <a href=https://challonge.com/esapenti#>stromectol order </a> stromectol cream order stromectol no prescription stromectol pharmacokinetics https://reallygoodemails.com/orderstromectoloverthecounterusa
Joan
where to buy resume paper best custom papers need help write my paper
Bobbyvaw
stromectol stock <a href=https://dramamhinca.zombeek.cz/#>stromectol tablets uk </a> stromectol reviews purchase stromectol stromectol cvs https://tropkefacon.estranky.sk/clanky/buy-ivermectin-fitndance.html
Bobbyvaw
stromectol pills <a href=https://theosipostmouths.estranky.cz/clanky/stromectol-biam.html#>buy ivermectin online </a> stromectol from costco stromectol overdose stromectol sale https://sanangelolive.com/members/thisphophehand
Karine
what should i write my paper on custom thesis papers best custom paper writing service
Bobbyvaw
stromectol france <a href=https://orderstromectoloverthecounter.com/#>https://orderstromectoloverthecounter.com/ </a> stromectol treatment scabies https://orderstromectoloverthecounter.com/ ivermectin dosage https://orderstromectoloverthecounter.com/
Alfredo
Прописка в Санкт-Петербурге
Bobbyvaw
buy ivermectin <a href=https://orderstromectoloverthecounter.com/#>https://orderstromectoloverthecounter.com/ </a> stromectol from costco https://orderstromectoloverthecounter.com/ what is stromectol https://orderstromectoloverthecounter.com/
Blake
Временная регистрация в Санкт-Петербурге
Alicia
Эротический массаж Уфа
Patrick
Компьютерный клуб в Уфе
Nan
Печи для бани купить в Санкт-Петербурге
Bobbyvaw
stromectol cvs <a href=https://aleserme.estranky.sk/clanky/stromectol-espana.html#>stromectol brasilien </a> stromectol no prescription stromectol medication buy ivermectin online https://orderstromectoloverthecounter.flazio.com/
Scarlett
Деревообрабатывающие станки купить в Москве
Bobbyvaw
buy stromectol online fitndance <a href=https://aleserme.estranky.sk/clanky/stromectol-espana.html#>stromectol australia </a> ivermectin stromectol tablets stromectol from costco https://orderstromectoloverthecounter.mystrikingly.com/
Bobbyvaw
pharmacy online no prescription <a href=https://sanangelolive.com/members/canadianpharmaceuticalsonlineusa#>canadian pharmaceuticals online </a> canadian pharmaceuticals online canadian online pharmacies pharmacy online shopping https://seedandspark.com/user/canadian-pharmaceuticals-online
canada prescription
overseas pharmacies https://greatcanadianpharmacies.com/ <a href=https://greatcanadianpharmacies.com/>canadapharmacy.com price list</a>
Bobbyvaw
online pharmacies <a href=https://www.mojomarketplace.com/user/Canadianpharmaceuticalsonline-EkugcJDMYH#>pharmacies </a> viagra pharmacy 100mg pharmacy cheap no prescription panacea pharmacy https://www.midi.org/forum/profile/89266-canadianpharmaceuticalsonline
Bobbyvaw
stromectol effectiveness <a href=https://buystromectol.livejournal.com/421.html#>stromectol australia </a> stromectol online pharmacy stromectol stromectol tablets https://orderstromectoloverthecounter.mystrikingly.com/
Bobbyvaw
stromectol india <a href=https://orderstromectoloverthecounter.fo.team/#>buy stromectol uk </a> stromectol for crabs stromectol no prescription buy ivermectin online https://orderstromectoloverthecounter.proweb.cz/
Vanessa
паяльники для пластиковых труб
Bobbyvaw
stromectol pill <a href=https://stromectoloverthecounter.wordpress.com/#>buy ivermectin online fitndance </a> stromectol tablets stromectol effectiveness stromectol for sale https://stromectoloverthecounter.wordpress.com/
Bobbyvaw
canadian pharmaceuticals online safe <a href=https://zencastr.com/@pharmaceuticals#>medicine online shopping </a> international pharmacy online pharmacies of canada canadian prescriptions online https://seedandspark.com/user/canadian-pharmaceuticals-online
Horirhill
<a href=https://stromectol.homes/>stromectol nz</a> Associations between continuous variables and composite and factor scores were measured using Pearson s correlation
Bobbyvaw
dose for stromectol <a href=https://stromectoloverthecounter.wordpress.com/#>buy ivermectin online </a> stromectol composition purchase stromectol purchase stromectol online https://aleserme.estranky.sk/clanky/stromectol-espana.html
Bobbyvaw
cheap pharmacy online <a href=https://www.cakeresume.com/me/best-canadian-pharmaceuticals-online#>canadian pharmacy online </a> shoppers drug mart pharmacy canada pharmacy drugstore online shopping https://my.afcpe.org/forums/discussion/discussions/reputable-canadian-pharmaceuticals-online
Bobbyvaw
reaction au stromectol <a href=https://aleserme.estranky.sk/clanky/stromectol-espana.html#>stromectol tablets </a> stromectol in india stromectol new zealand stromectol france https://buystromectol.livejournal.com/421.html
wholutt
Between 1980 and 1987, 248 patients with primary breast cancer were enrolled in a clinical trial EBCTC, 1998 in the Northern Health Region of Sweden and randomised to adjuvant tamoxifen treatment 40 mg daily, n 123, for 2 years vs control, n 125 <a href=http://priligy.me/>priligy alternative</a> Such a deal wouldneed to be done by the end of the month to give the company timeto gain creditor support ahead of about 250 million in interestpayments due on Nov
scenneipt
1996 Jun 15; 56 12 2789 94 <a href=https://nolvadex.one/>tamoxifen for weight loss</a>
Bobbyvaw
canadian pharmaceuticals <a href=https://medium.com/@pharmaceuticalsonline/canadian-pharmaceutical-drugstore-2503e21730a5#>canadian drugs </a> aarp recommended canadian pharmacies canadian pharmacies-24h canada pharmacy online https://canadianpharmaceuticals.educatorpages.com/pages/canadian-pharmacies-shipping-to-usa
Bobbyvaw
canadian online pharmacies legitimate <a href=https://medium.com/@pharmaceuticalsonline/canadian-pharmaceutical-drugstore-2503e21730a5#>pharmacy online cheap </a> canadian pharmaceuticals publix pharmacy online ordering national pharmacies https://medium.com/@pharmaceuticalsonline/canadian-pharmaceutical-drugstore-2503e21730a5
order drugs online
pharmacies not requiring a prescription https://canadianpharmaciesshop.com/ <a href=https://canadianpharmaciesshop.com/>top rated canadian mail order pharmacies</a>
Bobbyvaw
canada drugs online <a href=https://500px.com/p/maybenseiprep/?view=groups#>discount canadian drugs </a> pharmacies shipping to usa compound pharmacy walmart pharmacy online https://pinshape.com/users/2507399-best-canadian-pharmaceuticals-online
Kristie
Лечение наркомании в Уфе
TulaClima
<a href=http://doxycycline.world/>100mg of doxycycline</a> Sauberlich HE 1967 Biochemical alterations in thiamine deficiency their interpretation
Bobbyvaw
discount canadian drugs <a href=https://sanangelolive.com/members/contikegel#>canadian pharmaceuticals </a> pills viagra pharmacy 100mg pharmacy online drugstore 24 hour pharmacy https://obsusilli.zombeek.cz/
Karma
прописка в Москве
Anna
гостиничные чеки санкт петербург
Olivia
Временная регистрация в Москве
Rhissek
Don t viagra without prescription let breast cancer dictate how you live <a href=http://clomid.mom/>reviews of clomid</a> The aromatization of the A ring results in the production of estrogens, which is catalyzed by the cytochrome p450 enzyme or aromatase; this aromatase is encoded by the CYP19A1 gene 11
Bobbyvaw
publix pharmacy online ordering <a href=https://infogram.com/canadian-pharmacies-shipping-to-usa-1h1749v1jry1q6z#>pharmacie </a> canadian cialis online pharmacy canada online pharmacies in usa https://issuu.com/lustgavalar
Bobbyvaw
canadian pharmaceuticals <a href=https://rentry.co/canadianpharmaceuticalsonline#>pharmacy online shopping </a> canadian pharmacy cialis 20mg pharmacy online shopping online drugstore https://tawk.to/canadianpharmaceuticalsonline
Ambunny
<a href=https://stromectol.ink/>stromectol active ingredient</a> DISAGREE when you feel you need them, E has already been hammering at you and working its growth and potentially carcinogenic direct, secondary, tertiary and modulatory effects on breast tissue, adipocytes and prostate to name a few
Bobbyvaw
pharmacy online no prescription <a href=https://appieloku.estranky.cz/clanky/online-medicine-to-buy.html#>online pharmacies </a> canadian pharmacy cialis 20mg canadian pharmacies canadian viagra generic pharmacy https://pinshape.com/users/2513487-online-medicine-shopping
Bobbyvaw
on line pharmacy <a href=https://aoc.stamford.edu/profile/tosenbenlren/#>canadian pharmacies online </a> canada discount drug online pharmacies online pharmacy busted https://brujagflysban.zombeek.cz/
Terrie
coursework questions coursework info coursework vs research masters
Elke
coursework writing help coursework at a college or university coursework average calculator
Bobbyvaw
online pharmacies legitimate <a href=https://jemi.so/canadian-pharmacies-shipping-to-usa#>pharmacy on line </a> navarro pharmacy miami pharmacies canadian cialis https://rentry.co/canadianpharmaceuticalsonline
Bobbyvaw
erectile at 43 <a href=https://www.provenexpert.com/best-erectile-pills/#>which erectile dysfunction drugs cost more </a> best erectile dysfunction medicine best drugs for ed best erectile dysfunction drug https://500px.com/p/stofovinin/?view=groups
Emery
nea coursework coursework marking coursework define
Milagros
knewton coursework coursework ka hindi coursework knowledge definition
Landon
database coursework coursework meaning in english creative writing coursework
Natalia
coursework writer uk coursework degree coursework university
Bobbyvaw
erectile examination <a href=https://piesapalbe.estranky.sk/clanky/buy-erectile-dysfunction-medications-online.html#>erectile function paralysis </a> erectile vacuum pump fast erectile dysfunction drugs erectile pumps and rings https://www.provenexpert.com/best-erectile-pills/
Bobbyvaw
erectile growing foods <a href=https://plancaticam.estranky.cz/clanky/best-drugs-for-ed.html#>erectile function after prostate surgery </a> erectile pills that work erectile breast tissue erectile means https://www.provenexpert.com/best-erectile-pills/
Bobbyvaw
best erectile dysfunction pills <a href=https://plancaticam.estranky.cz/clanky/best-drugs-for-ed.html#>erectile natural diet pdf </a> erectile supplements that work best drugs for ed erectile nerve regeneration https://piesapalbe.estranky.sk/clanky/buy-erectile-dysfunction-medications-online.html
Bobbyvaw
tens 7000 erectile <a href=https://piesapalbe.estranky.sk/clanky/buy-erectile-dysfunction-medications-online.html#>erectile therapy pump </a> buy erectile dysfunction meds best erectile dysfunction drug erectile disorder vs erectile dysfunction https://plancaticam.estranky.cz/clanky/best-drugs-for-ed.html
Bobbyvaw
low cost erectile treatment <a href=https://aoc.stamford.edu/profile/plumerinput/#>best erectile dysfunction natural remedies </a> erectile response help with erectile dysfunction erectile rings https://pinshape.com/users/2517016-cheap-ed-drugs
Bobbyvaw
comparing erectile dysfunction drugs <a href=https://aoc.stamford.edu/profile/plumerinput/#>top erectile dysfunction pills </a> erectile male enhancement erectile improvement erectile dysfunction in men https://challonge.com/afersparun
Bobbyvaw
cheapest erectile dysfunction pill <a href=https://aoc.stamford.edu/profile/plumerinput/#>buy erectile dysfunction medications online </a> erectile injection video viagra without erectile dysfunction erectile prescription pills https://pinshape.com/users/2517016-cheap-ed-drugs
Bernardo
Холтер ЭКГ
Bobbyvaw
how to erectile dysfunction <a href=https://piesapalbe.estranky.sk/clanky/buy-erectile-dysfunction-medications-online.html#>which erectile dysfunction drugs cost more </a> erectile anxiety best erectile dysfunction medication erectile clinics cleveland https://www.provenexpert.com/best-erectile-pills/
Bobbyvaw
men with erectile dysfunction <a href=https://piesapalbe.estranky.sk/clanky/buy-erectile-dysfunction-medications-online.html#>erectile dysfunction </a> erectile device erectile pills over the counter erectile massage therapy https://wallsawadar.zombeek.cz/
Bobbyvaw
canadian drugstore <a href=https://the-dots.com/projects/covid-19-in-seven-little-words-848643#>online medicine order discount </a> online pharmacy canada on line pharmacy best online canadian pharmacy https://sway.office.com/bwqoJDkPTZku0kFA
Corey
Товары для животных
Bobbyvaw
online doctor erectile dysfunction <a href=https://www.provenexpert.com/best-erectile-pills/#>erectile trick </a> erectile function returns as copper decreases does erectile dysfunction affect desire best erectile dysfunction natural remedies https://aoc.stamford.edu/profile/plumerinput/
Bobbyvaw
compare erectile dysfunction medication <a href=https://plancaticam.estranky.cz/clanky/best-drugs-for-ed.html#>erectile exercises video </a> solutions to erectile dysfunction herbs for erectile dysfunction erectile curvature https://www.provenexpert.com/best-erectile-pills/
Leave a comment
Your email address will not be published. Required fields are marked *